Cet article de recherche sur l’IA présente une étude exhaustive de l’apprentissage profond pour la localisation visuelle et la cartographie.
Cet article de recherche présente une étude exhaustive de l'apprentissage profond pour la localisation visuelle et la cartographie.


Si je te demande, “Où es-tu maintenant ?” ou “A quoi ressemblent tes environs ?”, tu seras immédiatement capable de répondre grâce à une capacité unique appelée perception multisensorielle chez les humains, qui te permet de percevoir ton mouvement et ton environnement environnant, garantissant ainsi une conscience spatiale complète. Mais imagine si la même question est posée à un robot : comment aborderait-il le défi ?
Le problème est que si ce robot n’a pas de carte, il ne peut pas savoir où il se trouve, et s’il ne sait pas à quoi ressemblent ses environs, il ne peut pas non plus créer de carte. Fondamentalement, cela pose un problème de “qui est venu en premier, l’œuf ou la poule ?” qui, dans le monde de l’apprentissage automatique dans ce contexte, est appelé problème de localisation et de cartographie.
La “localisation” est la capacité d’acquérir des informations internes liées au mouvement d’un robot, y compris sa position, son orientation et sa vitesse. D’autre part, la “cartographie” concerne la capacité de percevoir les conditions environnementales externes, englobant des aspects tels que la forme des environs, leurs caractéristiques visuelles et leurs attributs sémantiques. Ces fonctions peuvent fonctionner indépendamment, l’une se concentrant sur les états internes et l’autre sur les conditions externes, ou elles peuvent fonctionner ensemble en tant que système unique appelé Localisation et Cartographie Simultanées (SLAM).
- Exploitez la puissance des LLM sollicitation sans entraînement et avec peu d’exemples
- L’icône de l’horreur Stephen King n’a pas peur de l’IA
- Une introduction du Pythonista au noyau sémantique
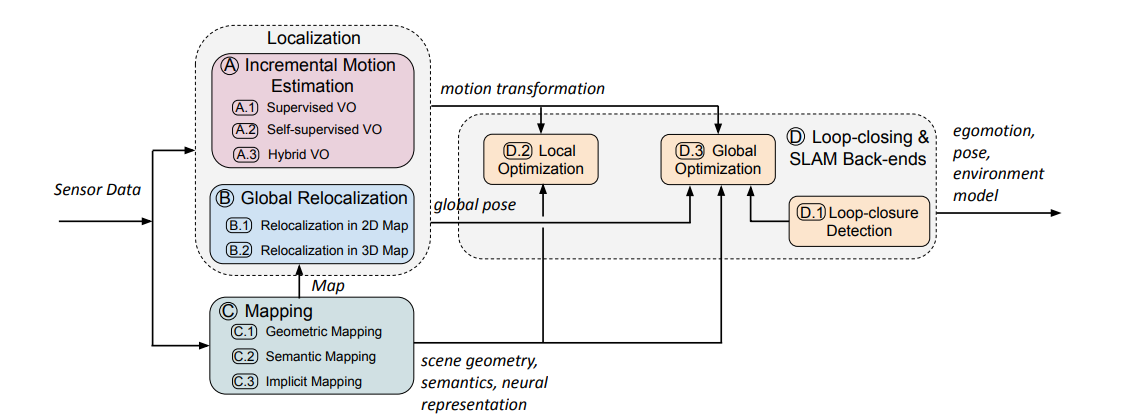
Les défis actuels des algorithmes tels que la relocalisation basée sur l’image, l’odométrie visuelle et le SLAM incluent des mesures de capteur imparfaites, des scènes dynamiques, des conditions d’éclairage défavorables et des contraintes du monde réel qui entravent quelque peu leur mise en œuvre pratique. L’image ci-dessus montre comment des modules individuels peuvent être intégrés dans un système SLAM basé sur l’apprentissage en profondeur. Cette recherche présente une enquête complète sur les approches basées sur l’apprentissage en profondeur et les approches traditionnelles et répond simultanément à deux questions essentielles :
- L’apprentissage en profondeur est-il prometteur pour la localisation visuelle et la cartographie ?
Les chercheurs estiment que les trois propriétés énumérées ci-dessous pourraient faire de l’apprentissage en profondeur une direction unique pour un système SLAM polyvalent à l’avenir.
- Premièrement, l’apprentissage en profondeur offre des outils de perception puissants qui peuvent être intégrés à la partie frontale visuelle du SLAM pour extraire des caractéristiques dans des zones difficiles pour l’estimation de l’odométrie ou la relocalisation et fournir une profondeur dense pour la cartographie.
- Deuxièmement, l’apprentissage en profondeur donne aux robots des capacités de compréhension et d’interaction avancées. Les réseaux neuronaux excellent dans le rapprochement de concepts abstraits avec des termes compréhensibles par l’homme, comme l’étiquetage de la sémantique des scènes dans une cartographie ou des systèmes SLAM, qui sont généralement difficiles à décrire à l’aide de méthodes mathématiques formelles.
- Enfin, les méthodes d’apprentissage permettent aux systèmes SLAM ou aux algorithmes de localisation/cartographie individuels d’apprendre de l’expérience et d’exploiter activement de nouvelles informations pour l’auto-apprentissage.
- Comment l’apprentissage en profondeur peut-il être appliqué pour résoudre le problème de la localisation visuelle et de la cartographie ?
- L’apprentissage en profondeur est un outil polyvalent pour modéliser divers aspects du SLAM et des algorithmes de localisation/cartographie individuels. Par exemple, il peut être utilisé pour créer des modèles de réseaux neuronaux de bout en bout qui estiment directement la pose à partir d’images. Il est particulièrement bénéfique pour gérer des conditions difficiles comme les zones sans caractéristiques, l’éclairage dynamique et le flou de mouvement, où les méthodes de modélisation conventionnelles peuvent avoir des difficultés.
- L’apprentissage en profondeur est utilisé pour résoudre des problèmes d’association dans le SLAM. Il facilite la relocalisation, la cartographie sémantique et la détection de boucle en connectant les images aux cartes, en étiquetant sémantiquement les pixels et en reconnaissant les scènes pertinentes des visites précédentes.
- L’apprentissage en profondeur est utilisé pour découvrir automatiquement des fonctionnalités pertinentes pour la tâche d’intérêt. En exploitant les connaissances préalables, par exemple les contraintes géométriques, un cadre d’auto-apprentissage peut être automatiquement mis en place pour le SLAM afin de mettre à jour les paramètres en fonction des images d’entrée.
Il convient de souligner que les techniques d’apprentissage en profondeur reposent sur de grands ensembles de données correctement étiquetées pour extraire des motifs significatifs, mais peuvent avoir du mal à généraliser à des environnements inconnus. Ces modèles manquent d’interprétabilité, fonctionnant souvent comme des boîtes noires. De plus, les systèmes de localisation et de cartographie peuvent être intensifs en calcul, mais hautement parallélisables, sauf si des techniques de compression de modèle sont appliquées.
We will continue to update IPGirl; if you have any questions or suggestions, please contact us!
Was this article helpful?
93 out of 132 found this helpful
Related articles
- Régression CatBoost Expliquez-le moi en détail
- L’implémentation du momentum de Nesterov de PyTorch est-elle incorrecte ?
- Débloquer le pouvoir de la diversité dans les réseaux neuronaux comment les neurones adaptatifs surpassent l’homogénéité dans la classification d’images et la régression non linéaire
- Au-delà de la courbe de Gauss Une introduction à la distribution de t
- Suivi des modèles d’apprentissage automatique en production pourquoi et comment ?
- Le problème de perception publique de l’apprentissage automatique
- Comprendre en profondeur les scores AUC quel est l’intérêt ?